建設機械の自動自律運転システムに関する次の記述を読んで,設問に答えよ。
A社は,ICTを活用した自動・自律運転の建設機械が相互に連携して土木工事を行うシステム(以下,SDシステムという)を開発した。SDシステムは,クラウドサービスで工事の計画を立案し,複数台の建設機械の連携動作を管理する(以下,これらをSDサービスという)ことで,大規模な土木工事を少人数で効率的に行うことができる。
山間部にあるダムの工事現場内で,SDシステムを用いて,自動自律運転可能な,ブルドーザ(以下,ACブルドーザという),ショベルカー(以下,ACショベルという)及びダンプカー(以下,ACダンプという)の車両(以下,ACブルドーザ,ACショベル及びACダンプを総称してAC車両という)を連携させて,土木工事を行うことになった。A社で構築したローカル5Gネットワーク(以下,L5Gという)を介して,各AC車両間,タブレット端末,現場事務所のL5G基地局を接続する。また,パブリック5Gネットワーク(以下,P5Gという)を介して,SDサービス,測位サービス,現場事務所のP5G送受信部を接続する。SDシステムのシステム構成を図1に,SDシステムの主な構成要素を表1に示す。

図1 SDシステムのシステム構成
表1 SDシステムの主な構成要素
〔SDシステム導入前の土木工事〕
土木工事の一つに,ブルドーザが,ダンプカーによって排土された土砂山を数回に分けて突き崩し,押土を行いながら設計の内容に従って土砂を均す作業(以下,敷均しという)がある。
運転者が従来式のブルドーザに搭乗して敷均しを行っていた頃は,設計担当者が作成した工事の計画を基にして,測量担当者が事前に工事現場を測量し,基準地点を設置しておき,運転者がブルドーザを頻繁に乗り降りして設計目標を満たせるように作業結果を目視確認する必要があった。運転者は,ブルドーザの運転席に乗り込み,車速計などの計器と周囲を見ながらレバーなどを操作してブルドーザの運転を行っていた。凸凹の多い地形を走行するときにはブルドーザの車体が傾斜するので,熟練した運転技術を要した。
〔SDシステム導入後の土木工事の例〕
SDシステムでの土木工事では,設計地盤を目標にして,ACブルドーザでの高精度の敷均しを実現することができる。オペレーターが次の手順で作業を実施する。
①オペレーターがタブレット端末でSDサービスに指示を出し,SDサービスから全AC車両に起動指令を送信する。各AC車両は,自己診断を実施し,異常がないことを確認する。
②各AC車両は,SDサービスで作成された工事計画を取り込む。工事計画には,設計地盤のほか,ACブルドーザの敷均し範囲,ACダンプが運搬してきた土砂を排土する予定位置(以下,排土位置という)などが複数登録されている
③オペレーターがタブレット端末でSDサービスに指示を出し,SDサービスから全AC車両に工事開始指令を送信する。ACブルドーザとACダンプは,工事開始指令を受信し,自動自律運転を開始する。
④ACダンプは,L5G経由でACブルドーザの位置を常時把握し,排土位置まで移動して排土する。
⑤ACブルドーザも同様にACダンプの位置を常時把握し,排土位置に向かって移動し,ACダンプの排土が完了するまで待機する。
⑥ACダンプは,排土後に,排土完了をACブルドーザに通知し,工事現場内にある所定の土砂の積込み位置まで移動する。
⑦ACブルドーザは,排土された土砂をブレードで押土しながら走行することによって(以下,押土されている土砂を押土土砂という),敷均しを実施し,進捗状況をSDサービスに送信する。
⑧ACダンプは,土砂の積込みが完了すると進捗状況をSDサービスに送信する。
⑨SDサービスは,各AC車両の進捗状況を常に把握し,機器故障などによって工事に遅れが発生した場合は,工事計画の見直しを実施して更新された工事計画を各AC車両に送信する。
〔SDシステムの遠隔監視制御〕
オペレーターは,AC車両の近くにいなくてもタブレット端末でSDサービスに指示を出し,SDサービスからAC車両への起動指令,工事開始指令を送信できるとともに,進捗状況を把握することができる。また,タブレット端末からのAC車両への非常停止指令は,SDサービスを介さず,送信できる。遠隔監視制御では,SDサービスが,AC車両などから受信したデータを用いて,設計地盤と現地盤の比較をリアルタイムで行う。その結果に基づき,タブレット端末に,設計地盤を3Dで描画した地図上に工事計画の完了/未完了の箇所を色分けして,工事の進捗状況を表示することができる。さらに,全AC車両の位置を表示することができる。
〔AC車両の概要〕
AC車両には,GNSS受信部,慣性計測ユニット(以下,IMUという),3D-LiDAR,ステレオカメラ,ミリ波レーダー,L5G送受信部などの機器が搭載されている。
GNSS受信部は,GNSS測位衛星からの電波を受信する。AC車両ではGNSS測位方式(以下,G-測位という)を採用しており,GNSS測位衛星から受信したデータを基に,測位サービスが算出した測位補強データを使用して高精度な測位を可能にしている。G-測位では,1秒周期で車両の位置及び方位を更新する。
車体IMUは,3軸加速度,3軸角速度を計測し,車体の動きを計測するのに使用する。データ更新周期は1ミリ秒である。
3D-LiDARは,光を使ったリモートセンシング技術を用いて物体検知や対象物までの距離,及び対象物の光の反射率を計測し,敷均しの仕上がり確認などに使用する。計測したデータ(以下,点群データという)を,ほかの機器に送信する。1台の3D-LiDARで1秒間に3Mバイトの点群データを送信する。
ステレオカメラ,ミリ波レーダーは,自車の周辺監視に使用する。
L5G送受信部は,L5G基地局を介して,ほかのAC車両及びタブレット端末と通信したり,現場事務所のイーサネットで接続されたP5G送受信部を経由してSDサービス及び測位サービスと通信したりすることができる。
AC車両は,計測日時データ,3D-LiDARで取得した点群データ,作業中の工事の内容を示す作業記録データ,機器故障の内容などのデータを記録する。
〔ACブルドーザの外観及び機器構成〕
ACブルドーザには,[AC車両の概要〕で説明されている機器のほか,次の機器などが搭載されている。
・ブレードIMUは,3軸加速度,3軸角速度を計測し,ブレードの動きを計測するために使用する。データ更新周期は1ミリ秒である。
・車両制御装置は,工事計画に基づいて,自車の自動自律運転の計画(以下,運転計画という)を作成する。運転計画に基づき,走行経路,走行速度及びブレードの位置を自動制御して工事を行い,その結果を基に,運転計画を更新する。
・油圧シリンダは,ブレードの油圧制御に使用する。また,付属している,ストロークセンサーは車体に対するブレードの上下の位置,油圧センサーはブレードが押土土砂から受ける圧力などの計測に使用する。
ACブルドーザの外観を図2に,ACブルドーザのシステム構成を図3に,ACブルドーザの車両制御装置の主な構成要素を表2に示す。

図2 ACブルドーザの外観
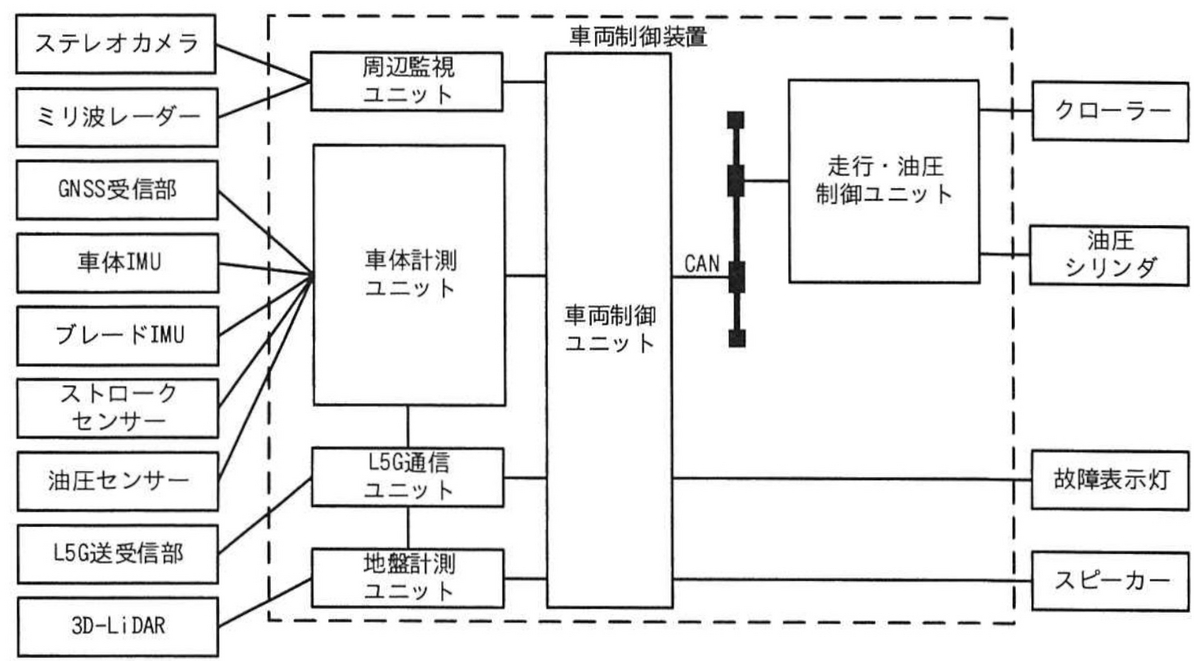
図3 ACブルドーザのシステム構成
表2 ACブルドーザの車両制御装置の主な構成要素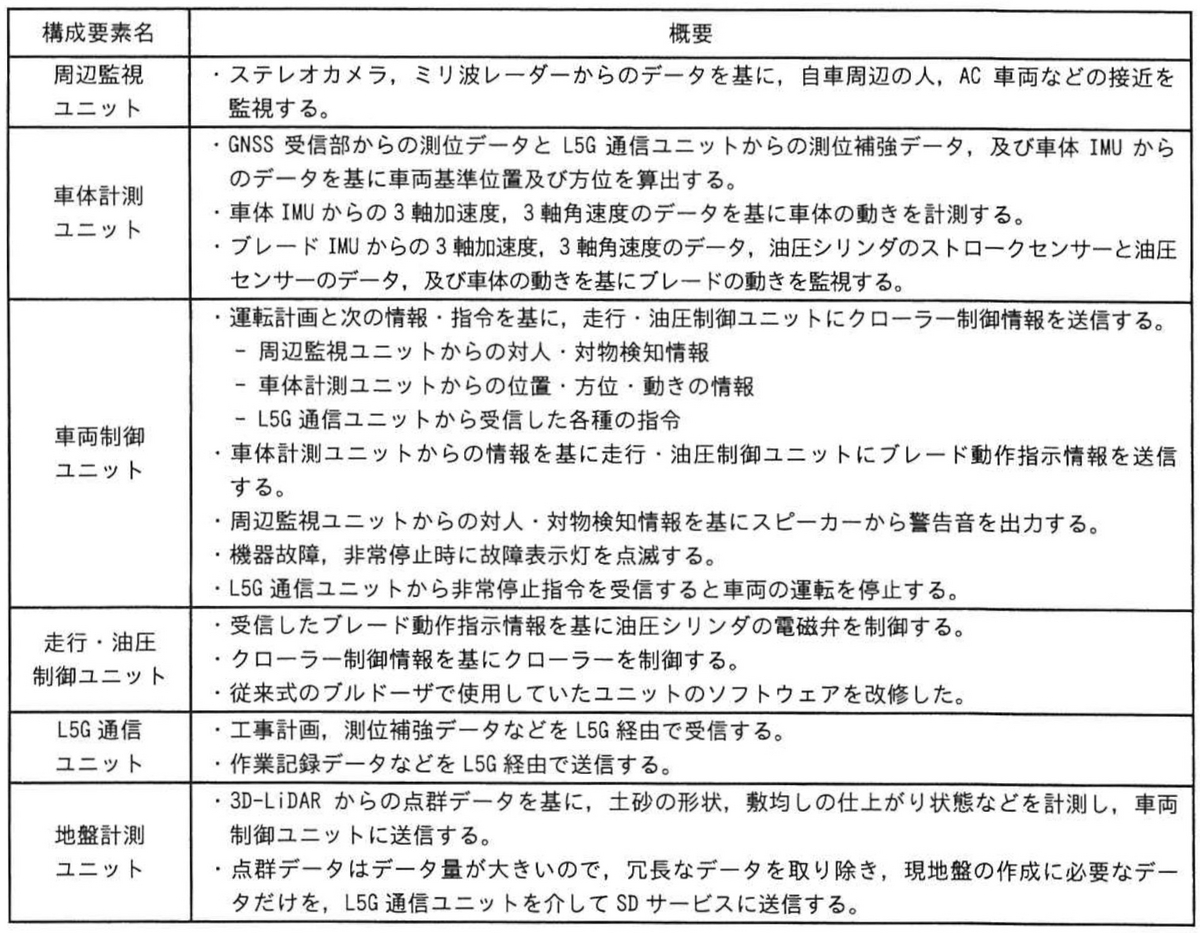
〔ACブルドーザの自動自律運転と敷均し基本動作〕
オペレーターはタブレット端末でSDサービスに指示を出し,SDサービスからACブルドーザに起動指令を送信する。ACブルドーザの車両制御ユニットは,L5G通信ユニット経由で起動指令を受信すると,ACブルドーザを起動する。その後,ACブルドーザの自動・自律運転は,幾つかある動作パターンを切り替えて実施する。
ACブルドーザの敷均しを図4に示す。敷均しでは,ACブルドーザは設計地盤が示す地面の形と同じになるように,ブレードの下側の刃先(以下,ブレード下端という)を設計地盤が示す高さの-30mmから+30mmの範囲で高精度に制御して,押土土砂を使って,地盤を整形する。設計地盤が示す地面より現地盤が示す地面が低い場合には押土土砂で埋められ,高い場合には設計地盤が示す地面より上にある土砂が削られる。この動作を繰り返し,敷均しを完成させる。
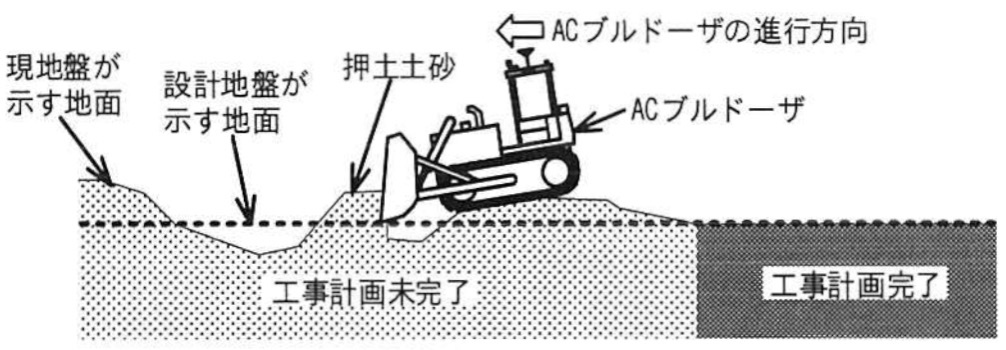
図4 ACブルドーザの敷均し
ACブルドーザの敷均しの動作パターンの一つの例として,基本パターンの手順を次に示す。
①車両制御ユニットはSDサービスから工事計画及び現地盤をL5G通信ユニット経由で受信する。
②SDサービスから工事開始指令を受信すると,工事計画にある排土位置の近くに移動する。
③ACダンプから排土完了を通知されると,車両制御ユニットは,工事計画にある設計地盤と現地盤の差分に基づいて運転計画を更新する。
④車両制御ユニットは,運転計画に従って,走行経路,走行速度を制御するとともに,ブレードの上下,傾斜を制御し,排土された土砂山の土砂を数回に分けて突き崩し,押土を行う。
⑤ a ことを検知すると,排土位置の近くに移動する。
⑥排土された土砂山が残っている場合,その土砂を使って敷均しを継続し,土砂山が残っていない場合,ほかの動作パターンに切り替える。
また,次の処理は,自動自律運転中,同時並行で実施される。
・3D-LiDARで取得した点群データを一部抽出し,SDサービスに送信する。また,ACダンプから排土された土砂山の形状と土砂量を推定する。
・推定した土砂山の形状と土砂量を用いて,運転計画の見直しを実施する。
・自車周辺に人,AC車両などを検知した場合は,警告音を鳴らして運転を停止する。
・機械系故障,G-測位の異常などの機器故障が発生した場合は,運転を停止し,SDサービスに機器故障の内容を通知し,故障表示灯を点滅させる。
・L5G通信異常が発生した場合は,運転を停止し,故障表示灯を点滅させる。
〔ACブルドーザの車両基準位置測位〕
ACブルドーザは,GNSS測位衛星からの電波を受信しやすい屋根に,(ア)2台のGNSS受信部を前後に搭載している。GNSS受信部の位置を測位して,図2に示した車両基準位置を算出する。
ACブルドーザのブレード下端の高さの制御にも,車両基準位置などの情報を用いる。
設問1 SDシステムの仕様について答えよ。
(1)事故の予防について答えよ。
(a)ACブルドーザは,自車周辺の人,AC車両などの検知に,ステレオカメラ以外にミリ波レーダーも使用しているのはなぜか。35字以内で答えよ。
解答・解説
解答例
・ステレオカメラは,天候不良時や夜間の撮影に適さないから
・ミリ波レーダーは,天候不良時や夜間でも検出性能が低下しにくいから
解説
ー
(b)あるACブルドーザだけが故障表示灯を点滅させて運転を停止した。タブレット端末で確認してみるとSDサービスに情報を通知していないのは,そのACブルドーザだけであった。運転が停止した原因は何か。本文中の字句を用いて答えよ。
解答・解説
解答例
L5G通信異常
解説
ー
(2)〔SDシステムの遠隔監視制御〕について答えよ。
(a)P5Gの通信データ量を削減するために,地盤計測ユニットでは,点群データから冗長なデータを取り除き,現地盤の作成に必要なデータを抽出している。ACブルドーザでは,送信するデータ量を元の点群データに対して何%としているか。答えは小数第1位を四捨五入して,整数で求めよ。ここで,ACブルドーザの1日当たりの稼働時間は8時間であり,その間に送信するデータ量は1台当たり27Gバイトとする。また,1Gバイト=1,024Mバイトとする。
解答・解説
解答例
16
解説
ー
(b)タブレット端末に全AC車両の位置を表示する。P5G送受信部を介してP5G経由で受信するデータのうち,AC車両の位置に関わるデータは何か。本文中の字句を用いて答えよ。
解答・解説
解答例
測位補強データ
解説
ー
設問2 SDシステムの設計について答えよ。
(1)排土された土砂山の形状を計測したところ円錐型であった。排土された土砂山の外観を図5に示す。土砂山の勾配は何度か求めよ。答えは小数第1位を四捨五入して,整数で求めよ。ここで,土砂山の円錐の底面は水平で,かつ,ACブルドーザの車両基準位置と土砂山の底面の間は水平だったものとする。

図5 排土された土砂山の外観
解答・解説
解答例
45
解説
ー
(2)〔ACブルドーザの車両基準位置測位〕について答えよ。
(a)〔ACブルドーザの車両基準位置測位〕の本文中の下線(ア)について,車両基準位置を測位する以外にどのような情報を取得するためか,15字以内で答えよ。
解答・解説
解答例
・車体の方向
・ACブルドーザの方向
・計測値の確からしさ
解説
ー
(b)地面の凸凹にかかわらず屋根に設置されたGNSS受信部(前)の測位した位置を用いて車両基準位置を正確に算出するには,図2中に記載されているどの機器をどのように使用すればよいか,25字以内で答えよ。
解答・解説
解答例
車体IMUを用いて車体の傾きを計測する。
解説
ー
(3)ブレード下端の高さを一定にする制御を10ミリ秒周期で実施したい。1秒周期で更新される車両基準位置及び方位に加え,油圧シリンダのストロークセンサーだけでは計測が間に合わないことが分かった。ブレード下端の高さの測位は,どのように行うべきか。30字以内で答えよ。
解答・解説
解答例
ブレードIMU及び車体IMUを用いて,補正する。
解説
ー
(4)〔ACブルドーザの自動・自律運転と敷均し基本動作〕について答えよ。
(a)〔ACブルドーザの自動自律運転と敷均し基本動作〕の⑤は,ある機器を用いてある状態になったことを検知する。本文中の a に入れる適切な内容を40字以内で答えよ。
解答・解説
解答例
油圧シリンダの油圧センサーを用いて押土土砂がなくなった状態になった
解説
ー
(b)ストロークセンサーの値の変化を図6に示す。図中の矢印(イ)の時点で,どのようなことが起きたと考えられるか。15字以内で答えよ。ここで,ACブルドーザは敷均し中で,ブレードを制御しており,TaからTbの間ブレード下端は設計地盤で示す高さと一致していたものとする。また,設計地盤は水平であったものとする。

図6 ストロークセンサーの値の変化
解答・解説
解答例
・車体が傾斜した。
・車体が上下した。
解説
ー
設問3 SDシステムの機能追加について答えよ。
(1)障害対策について答えよ。
SDシステムは,工事に遅れが発生すると,1日当たり数百万円以上の損失が生じる可能性がある。そこで,ある障害に対応するために,二つの異なる回線のP5Gを使用することにした。ここで,新設するP5Gを新P5Gとし,既存のP5Gを旧P5Gとする。
AC車両とタブレット端末に新P5Gの送受信部を増設した。AC車両がセンサーなどで計測したデータを送信する場合,AC車両はL5Gと新P5Gに同じデータを並行して送信する。
(a)二つの異なる回線のP5Gを採用したのは,どのような障害に対策するためか。25字以内で答えよ。
解答・解説
解答例
一方の回線を使用した通信ができなくなる障害
解説
ー
(b)ACブルドーザが新P5Gの通信圏内の場合でも,ある情報の取得を確実にするためにはL5Gは欠くことはできないと考えられる。その情報を二つ,本文中の字句を用いて答えよ。
解答・解説
解答例
・ACダンプの位置
・排土完了の通知
・非常停止指令
・時刻の同期
解説
ー
(2)工事現場内のトンネル内でのACダンプの自動自律運転について答えよ。
G-測位が利用できないトンネル内でも,AC車両を自動・自律運転可能とする機能追加を検討した。曲がりくねった見通しの悪いトンネル内を走行することを想定して,ACダンプの3D-LiDARで自車の周囲360度の点群データを取得することにした。
そのため,実稼働の前に準備段階として,トンネルを走行しながら点群データを取得し,トンネル内の3Dマップを作成して,走行経路と対応付けて記録することにした。自動自律運転時には,3Dマップ上に3D-LiDARで取得した点群データをマッチングさせて自己位置を推定(以下,自己位置推定という)して走行する。ACダンプの3Dマップ作成の様子を図7に示す。
トンネル内は,L5Gの通信は可能である。また,トンネルの左右の壁面には,模様が描かれたプレートを20mおきに設置する。プレートの模様は,プレートごとに異なり,重複するものはない。
図7 ACダンプの3Dマップ作成の様子
(a)壁面に設置した異なる模様のプレートを用いて可能となることは何か答えよ。
解答・解説
解答例
・トンネル内の絶対位置の検出
・自己位置推定の補正・精度向上
解説
ー
(b)次の記述中の b , c に入れる適切な字句を答えよ。
ACダンプに搭載されているセンサー類を使って,センサーフュージョンとして自己位置推定の機能の向上を図りたい。そのために各センサーの b , c ,及び耐環境性を把握しておく必要がある。
解答・解説
解答例
b:検出精度
c:処理時間
解説
ー
IPA公開情報
出題趣旨
建設業界では,生産性向上,労働力不足の解消などが求められており,ICT を用いた建設機械の開発が盛んに行われている。
本問では,ICT を活用した自動・自律運転の建設機械が相互に連携して土木工事を行うシステムを題材として,システムの要件を検討する能力,安全性に配慮して設計する能力,要求仕様に応じてセンサーを活用する能力,制御の要件を検討する能力,及び追加機能を検討する能力を問う。
採点講評
問 1 では,ICT を活用した自動・自律運転の建設機械が相互に連携して土木工事を行うシステムを題材に,システムの仕様,センサーの活用,制御要件の検討,追加機能の検討について出題した。全体として正答率は平均的であった。
設問 1(1)(a)は,正答率が低かった。ステレオカメラとミリ波レーダーの併用についての出題であったが,それぞれの特徴について正しく比較されていないと思われる解答が散見された。本問で採用されているセンサーの特徴は,ICT を活用したシステムの設計に非常に重要な知識であるので,是非理解を深めてほしい。
設問 2(4)(a)は,正答率が低かった。設問は,AC ブルドーザの敷均しの動作パターンの一つである基本パターンの手順①~⑥のうち,⑤の内容について問うているが,手順として⑤から⑥につながらなくなる解答が散見された。一連のシステムの動作手順における穴埋めについて解答する場合は,与えられた条件を理解し,手順として無理のない流れになるように考慮した上で解答してほしい。
設問 3(2)(a)は,正答率が低かった。設問 3(2)に記載されているプレートの特徴を考慮して,自己位置推定で可能となることについて解答してほしい。